Inside the human head, the stakes run high for surgeons removing tumors and other lesions in close proximity to delicate structures like the brain, facial nerve or optic nerves. With orbital and orbital apex tumors, which may occupy the tight quarters of the posterior cone or lie lateral to the optic nerve, the access challenges can defy even advanced surgical strategies.
At Vanderbilt University Medical Center, rhinology and skull base surgeon Paul Russell, M.D. and occuloplastics surgeon Louise Mawn, M.D. regularly team up on complex cases, using a dual-orifice approach to expand safe access to tight or deep spaces. Now, the two have partnered with Robert J. Webster III, Ph.D., a mechanical engineer and cofounder of the Vanderbilt Institute for Surgery and Engineering, to explore using Webster’s novel concentric tube robots that offers additional “hands” for reaching delicate tumor sites.
“I only have one hand that holds the camera and one hand that operates. I can use the scope holder and get two hands, but with the robot I can have three or even four. That will allow me to move things out of the way better and resect better,” Russell said.
Two-surgeon Approach
As a surgical team, Russell and Mawn optimize their combined four hands by having Mawn come in from behind the eyeball while Russell enters from the sinuses, where there is more room to maneuver. From this angle, Russell is also able to move some tissues Mawn cannot reach.
“We can handle issues in the orbit that many surgeons probably don’t realize can be done.”
Russell and Mawn have enjoyed a 15-year surgical partnership. “We’ve spent a lot of time and energy developing our multidisciplinary combined approach,” Russell said. “We can handle issues in the orbit that many surgeons probably don’t realize can be done, preserving vision and getting good cosmetic results.”
Creating a “Miniature da Vinci”
Ideally, the complex anatomical challenges Russell and Mawn face would be met through “more hands.” Webster’s concentric tube robot fits the bill by offering not only more hands, but tiny ones, some one tenth the size of the standard da Vinci® arm. “We currently make manipulator arms that are 2 mm in diameter and smaller, and we even have the capability of forming one that is 0.2 mm at its tip,” Webster said.
The smaller size is only one way in which this machine brings value to orbital and orbital apex surgery. The other lies in the design of the arms themselves. Made of nitinol, each concentric tube is formed by heat treatment to have a preset curvature and is highly elastic — ideal for operating in spaces like the back of the eye. Customized for particular surgeries, the robot’s processor controls the movement of each tube within each arm, telescoping and twisting to follow the surgeon’s commands.
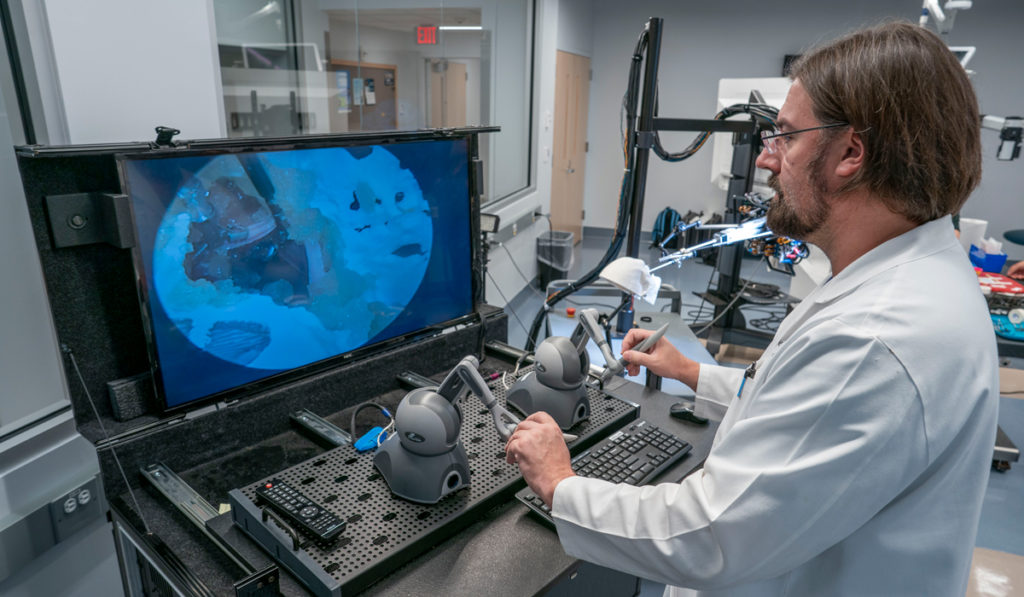
To perfect the application, Webster and a cadre of engineering students are observing as Russell and Mawn perform surgery on phantoms and cadavers. “We use the surgeons’ feedback to temper our assumptions about what is working well, and help us tweak our designs,” Webster said. “If it doesn’t feel good to the surgeon, it doesn’t matter how cool the technology is, it will never make it.”
A Host of New Applications
The first application for the robot was prostate surgery, and Webster foresees FDA approval within two years. Following this “first-in-human” approved use, Webster forecasts other applications gaining quick approval.
“We aim to do for endoscopy what da Vinci® did for laparoscopy.”
“No one ever envisioned using da Vinci® for 90 percent of what they’re doing with it now — all kinds of crazy stuff, successfully, and with good results,” Webster said. “I see this same kind of impact potential for our robot. We aim to do for endoscopy what da Vinci® did for laparoscopy.”
Until then, Russell and Mawn will continue to pair their surgical skills to resect lesions from an incredibly challenging region of the body.





